
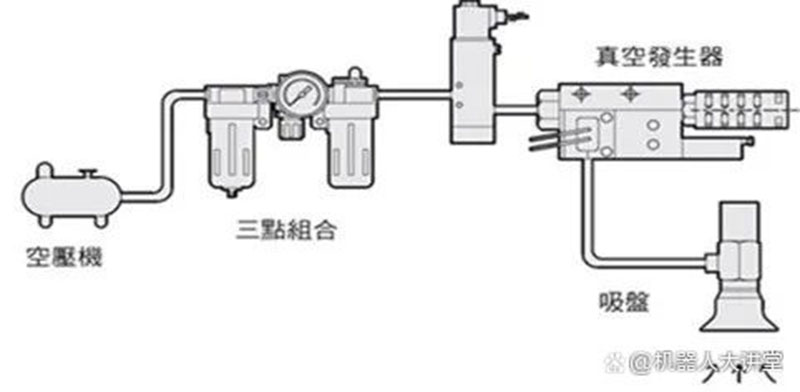
Аз нуқтаи назари сохтори функсионалӣ, иҷрои генератори вакуумӣ асосан клапани назорати электромагнитӣ барои назорат кардани генератори вакуумӣ барои амалӣ кардани тавлиди фишори манфӣ ва қатъ, то ба вазифаи ҷалб ва озод кардани порчаи корӣ мебошад.
Дар натиҷа, система умуман ҷузъҳои зеринро дар бар мегирад: 1. Манбаи ҳавои фишурда;2. Филтр;3. Калиди клапани электромагнитӣ;4. Фаъолкунандаи вакуумӣ;5. Сохтори охири, болишти пневматикӣ ва ғ. (Сохтори маъмулӣ дар расми зер нишон дода шудааст).
Илова бар ин, тибқи талаботи автоматикунонии саноатӣ, барои амалӣ намудани мониторинги раванди адсорбсияи вакуумӣ, баъзе истеҳсолкунандагон умуман ҷузъҳои назорати пневматикӣ, аз қабили ҳисобкунакҳои ҷараён, гузаргоҳҳои муайянкунии фишор ва гузаргоҳҳои наздикро дар солҳои охир ба система илова мекунанд.
Аммо, азбаски аксари ҷузъҳо аз ҷониби интегратор мувофиқи эҳтиёҷоти муштарӣ ва шароити корӣ дар макон тағир дода мешаванд, мураккабии тамоми система аксар вақт баланд аст.
Дар айни замон, истеҳсолкунандагони сершумори ҷузъҳо ба корҳои мураккаби насб ва ба кор даровардани иншоот оварда мерасонанд ва баъзеи онҳо истеъмоли зиёди энергия ва 100% аз манбаъҳои газ вобастагӣ доранд.Интегратсияи қисман имконнопазир аст
Аз ифлосшавии садо худдорӣ кунед, ки маънои мушкилоти қобили қабул барои муҳити дақиқи баланд ва тоза, аз қабили батареяҳои литийӣ ва нимноқилҳоро дорад.
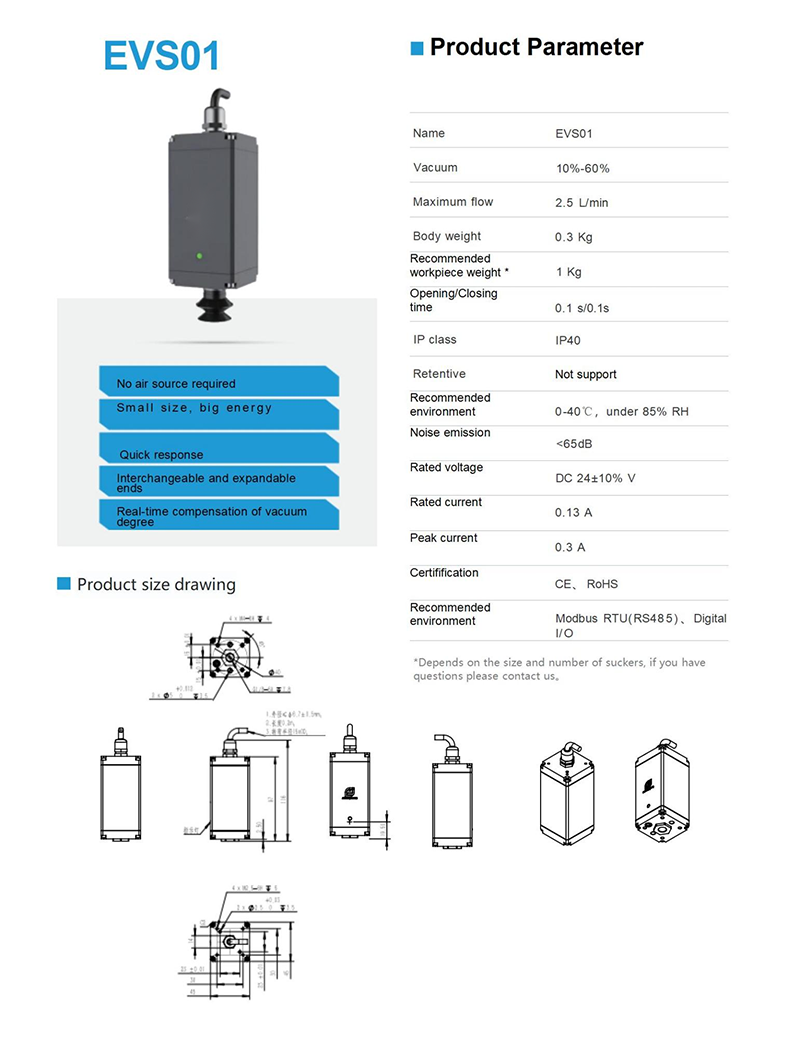
Дар маҷмӯъ, EVS насли нави фаъолкунандаи вакуумии интеллектуалии электрикӣ мебошад, ки манбаи иловагии ҳавои фишурдашударо талаб намекунад, ки бешубҳа ҷолиби диққат аст.
Бартарии калонтарини системаи сарфаи ҳаво осонии насби он мебошад.Зеро ин бешубҳа метавонад ҷузъҳои зиёди ёрирасон, аз ҷумла компрессорҳои ҳаво, зарфҳои нигоҳдории ҳаво, таҷҳизоти тозакунандаи ҳаво ва қубурҳои баромад ва ғайраро коҳиш диҳад ва барои истифода кардани муштариён ноқилҳоро осонтар ва қулайтар ва равшантар кунад.
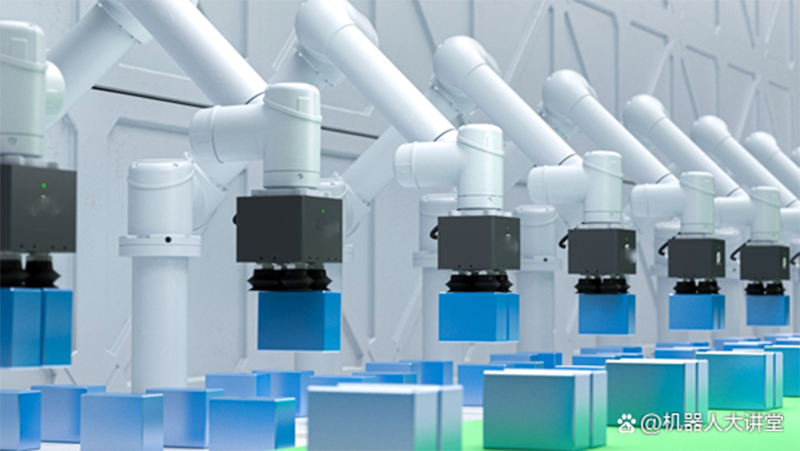
Гуфта мешавад, ки дар ҳоли ҳозир бисёр саҳнаҳо, аз ҷумла платформаҳои роботҳои мобилӣ, василаи электронии 3С, истеҳсоли батареяи литий, истеҳсоли нимноқилҳо, логистикаи экспресс ва ғайра тарҳбандии фазои нисбатан паймон доранд.
Батареяи мураббаъ EVS08
Тафсилоти бештар ва афзалиятҳо
Дар толори лектория роботҳо фаҳмид, ки ин маҳсулот, ки хеле хурд менамояд ва ҳамагӣ 2,5 кг вазн дорад, метавонад ба сатҳи баланди 10 кг мерасад.Дар робита ба тарҳи 24V пастшиддат, истеъмоли энергия 20% системаи анъанавии пневматикӣ аст, ва қувваи adsorbtion дар охири метавонад танзим ва тасҳеҳ, ва қувваи adsorbtion метавонад ба 102-510N мерасад.
Дар робита ба тарҳрезии сохторӣ, EVS тарҳи сохтории бештар паймон ва сабукро қабул мекунад, ки EVS-ро нисбат ба аэродинамикаи анъанавӣ барои вазни якхелаи бор 30% хурдтар мекунад.
Ҳамзамон, он метавонад мустақиман ба пайвасткунаки охири бозуи роботӣ пайваст карда шавад, ки ҷузъҳои ёрирасони зиёдатиро коҳиш медиҳад, истифодаи онро чандиртар мекунад, зуд ҷойгир карда мешавад ва метавонад объектҳои зиёди калонро ба осонӣ бирӯяд, махсусан барои ҷамъкунӣ, коркард ва дигар амалиётҳои саҳна.
Бо максади бехтар намудани кулайи истифода, двигатели вакуумии электрики инчунин интерфейси интегралй дорад, ки онро барои назорат ва назорати тамоми процесси адсорбкунии объектхо истифода бурдан мумкин аст.
Гуфта мешавад, ки ин барои роҳати муштариён барои назорат кардани дараҷаи вакууми фаъолкунандаи вакуумӣ тавассути дастурҳо ва инчунин тавассути пайванди IO барои мониторинг ва нигоҳдории пешгӯии раванди адсорбсия аст.Мониторинги вазъ хатогиҳо ва вақти бекориро коҳиш медиҳад ва дастрасии системаро таъмин мекунад.
Дар ин замина, афзалиятҳо ва хусусиятҳои EVS инчунин дар нуктаҳои зерин инъикос меёбанд:
1. Сохтори паймон ва вазни сабук: EVS ҳангоми азхудкунии ҳамон вазни сарборӣ аз андозаи анъанавии пневматикӣ 30% хурдтар аст.Он метавонад бо пайвасткунак дар охири бозуи механикӣ пайваст карда шавад, то азхудкунии сарборӣ, махсусан барои stacking, коркард ва дигар амалиёти саҳна мувофиқ;
2. Конфигуратсияи фаровони терминал: Намудҳои гуногуни пиёлаҳо, болишти муҳофизатӣ ва ҷузъҳои дигар метавонанд барои амалӣ кардани фаҳмиши ашёҳои гуногун, аз ҷумла ҷузъҳои мураббаъ, сферикӣ ва махсусшакл танзим карда шаванд;
3. Каналҳои дугона метавонанд мустақилона идора карда шаванд: паҳлӯҳои чап ва рости фаъолкунандаи чангкашакро ба осонӣ идора кунед ва ду тараф аз ҳамдигар мустақиланд, самаранокии кории хатти истеҳсолиро боз ҳам беҳтар мекунанд.Он дар як вақт ҷобаҷокунӣ ва ҷойгиркуниро амалӣ мекунад, ки коркард ва ҷудокунии ашёро хеле осон мекунад, фазо ва вақтро сарфа мекунад;
4. Фабрикаи танзимшаванда: дараҷаи вакуумро мувофиқи хусусиятҳои маҳсулоти ширшуда танзим кардан мумкин аст ва ҷуброни вакуумиро дар вақти воқеӣ амалӣ кардан мумкин аст;
5. Баррасии ҳолати: Он дорои як сенсори бозгашти вакуумӣ, ки метавонад ҳолати адсорбсияи объектҳоро дар вақти воқеӣ муайян кунад ва фикру мулоҳиза ва ҳушдор диҳад;
6. Муҳофизати хомӯш кардани барқ: Пас аз хомӯш кардани барқ, он метавонад худкушии адсорбсияи барқро барои муҳофизат кардани объектҳои adsorbed амалӣ кунад;
7. Мутобиқсозии қавӣ: дастгирии 24V I / O ва протоколи алоқаи MODBUS RTU (RS485);
8. Насб кардан ва ислоҳ кардан осон: протоколи иртиботӣ оддӣ ва хондашаванда аст, ки мушкилии ислоҳро хеле коҳиш медиҳад.Илова бар ин, нармафзори ислоҳи компютери мизбон метавонад ҳамчун тӯҳфа замима карда шавад, ки онро барои танзим ва танзим кардани параметрҳои функсия дар офлайн танзим кардан мумкин аст.
Хулоса ва оянда
Дар доираи тамоюли автоматикунонӣ ва иктишофӣ, фаъолкунакҳои барқии вакуумӣ ба ҷузъҳои асосии таъмини кори мӯътадили роботҳо ва системаҳои автоматикунонӣ табдил ёфта, истифодаи системаҳои фаъолкунандаи барқро қулайтар ва осонтар мекунанд ва метавонанд ба сенарияҳои диверсификатсияшуда мувофиқат кунанд. роботҳои таркибии мобилӣ..
Интерфейси ҳамгирошуда ва конфигуратсияи бои терминал ва дигар оптимизатсияҳо метавонанд эътимоднокии ҷузъҳои калидии роботро боз ҳам беҳтар гардонанд, таваққуфҳои истеҳсолот ва мушкилоти ҷойгиркунии фосилавӣ барои корбарони ниҳоӣ ва коҳиши минбаъдаи хароҷоти нигоҳдорӣ ва пас аз фурӯшро коҳиш диҳанд.
Вақти фиристодан: апрел-19-2023